

Con Zhurong la Cina atterra su Marte
Il lander Zhurong della missione Tianwen 1 atterra su Marte dopo mesi di attesa.
Oggi, Sabato 15 Maggio 2021, l’agenzia spaziale cinese ha fatto atterrare su Marte il rover della missione Tianwen-1.
Si chiama Zhurong (祝融), porta il nome di un’antica divinità del folklore cinese legata al fuoco, rosso come il pianeta verso cui è stato diretto.
L’Attesa
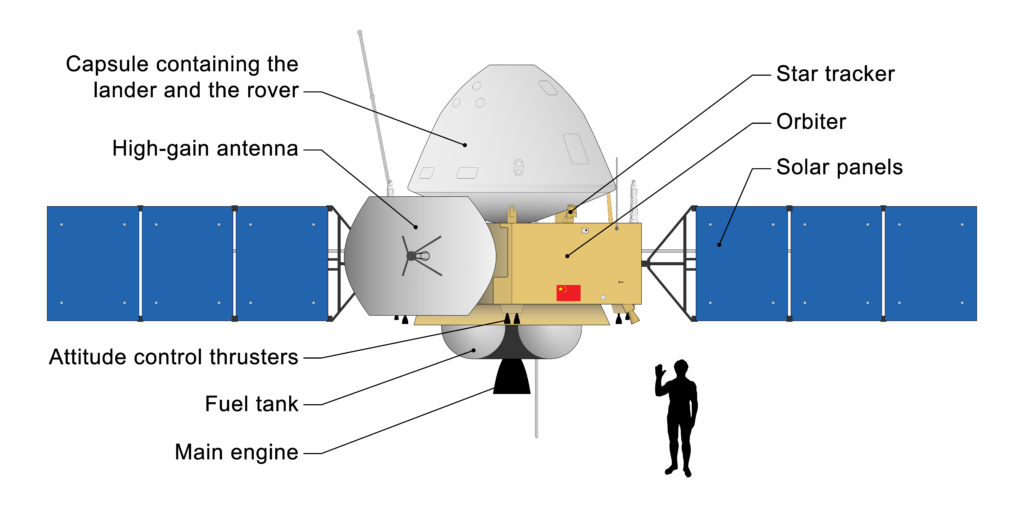
Tianwen-1 è entrata in orbita marziana il 10 febbraio 2021, ad un altitudine di circa 295 km dalla superficie. Il rover Zhurong ha dovuto attendere questi mesi all’interno della capsula attraccata all’Orbiter affinché questi effettuasse prima un’accurata scansione del sito di atterraggio.
L’Atterraggio
Il rover era in realtà stipato all’interno di un lander. La capsula, una volta rilasciata e posta in traiettoria di rientro è entrata a contatto con l’atmosfera del pianeta a 125 km con una velocità di 4,85 km/s. Proteggendo il lander con lo scudo termico ha eseguito con successo la manovra di aerofreno, attraverso cui ha smaltito in calore l’elevatissima velocità. Successivamente la capsula ha rivelato il suo contenuto, rilasciando il lander che ha continuato la discesa decelerato da un paracadute. All’altezza di 100 metri sono entrati in funzione il propulsore di bordo che hanno posto il lander in hovering. Grazie ad un sistema di guida laser il lander ha potuto eseguire un atterraggio controllato attraverso il propulsore principale e dei propulsori di controllo d’assetto, che lo hanno poggiato dolcemente sulla superficie. I minuti più pericolosi dell’intera missione.
Di seguito: l’animazione della sequenza di atterraggio.
Dal lander uscirà il rover che sarà attivo per almeno 90 sol, e che con i suoi sei strumenti studierà la composizione del suolo marziano e la distribuzione dell’acqua sotterranea, mentre l’Orbiter Tianwen fornirà il ponte radio con la Terra. Il Rover è dotato di 6 ruote, è alimentato da pannelli fotovoltaici, ed ha una massa di circa 285 kg,
Gli Strumenti Scientifici di Zhurong
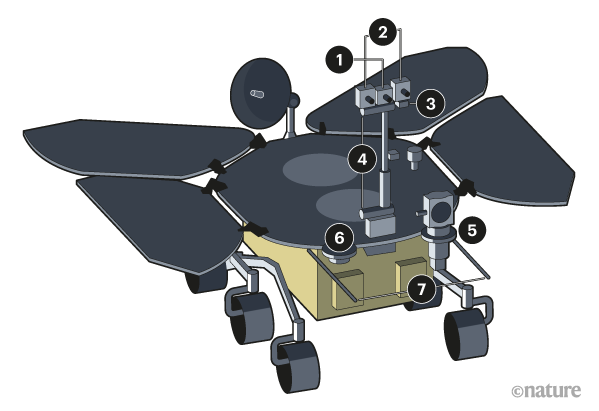
Il rover è dotato di sei strumenti scientifici che lo renderanno in grado di fare un’analisi a tutto tondo del terreno. E’ equipaggiato con:
- 1) La Multi-Spectrum Camera (Msc), una camera che permetterà di ottenere immagini dalla superficie a più frequenze.
- 2) Infine la Navigation and Topography Camera (Ntc), una camera per la navigazione a vista.
- 3-6) Il Mars Meteorological Measurement Instrument (Mmmi), con cui svolgerà il ruolo di stazione meteorologica.
- 4) La Mars Surface Magnetic Field Detector (Msmfd), per lo studio dei campi magnetici residui sulla superficie del pianeta.
- 5) Il Mars Surface Compound Detector (Mscd), per l’analisi della composizione del suolo.
- 7) Il Ground-Penetrating Radar (Gpr), un radar in grado di analizzare fino a 100 metri in profondità;
La missione si pone con lo scopo di essere anche un dimostratore tecnologico per la futura missione di Sample Return da parte dell’Agenzia Spaziale Cinese.
Sito di Atterraggio
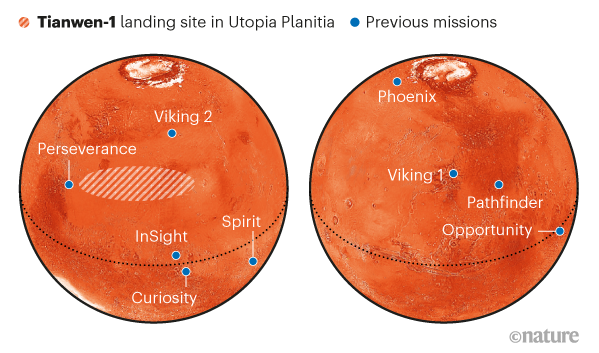
Il luogo di atterraggio è situato nella Utopia Planitia, non troppo lontano dal luogo in cui è atterrato il rover Perseverance il 18 febbraio di quest’anno e da dove il Viking 2 atterrò nel 1977, una regione pianeggiante e ricca di possibili obiettivi interessanti anche da un punto di vista astrobiologico. Zhurong atterra su Marte. Così si interrompe il lungo periodo di permanenza sulla superficie di Marte di sole missione della NASA. Infatti era dal lontano 1973, con la missione sovietica Марс 3 (Mars 3), che un lander/rover non NASA si poggiava con successo sulla superficie del Pianeta Rosso.
In Copertina: Animazione dell’atterraggio di Zhurong su Marte. Credis: CGTN.