
Starship Update e MK1
La notte fra il 28 ed il 29 Settembre, alle 3:00 ore italiane è cominciata la diretta sugli aggiornamenti del progetto intrapreso da SpaceX per lo sviluppo di un lanciatore riutlizzabile ed una navicella in grado di portare cargo e/o esseri umani verso la Luna, Marte, e potenzialmente, oltre.
A presentare le novità: il CEO della società privata, Elon Musk.
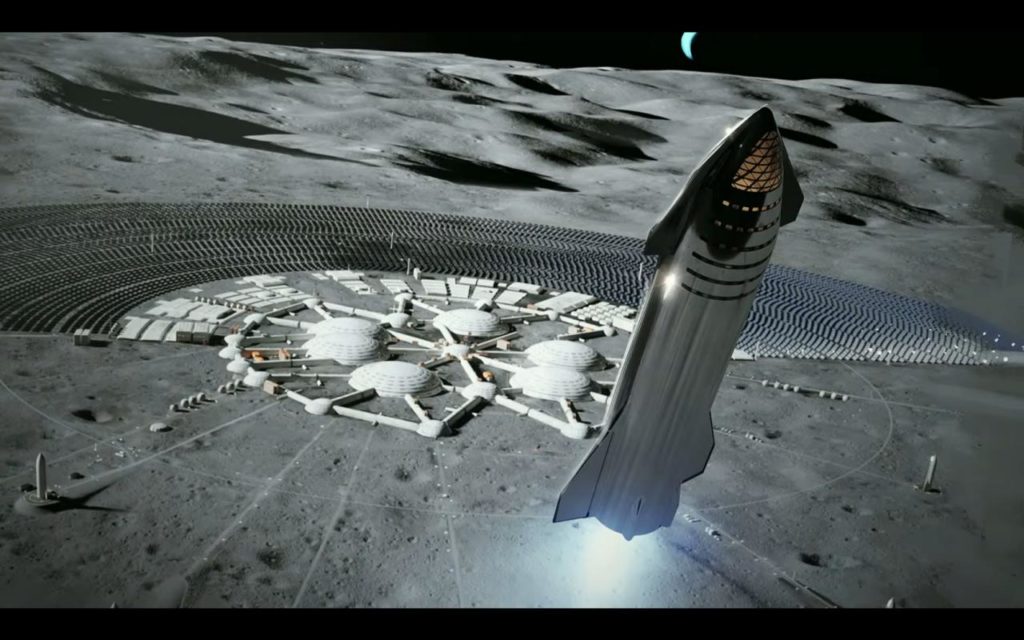
La conferenza è stata tenuta il giorno dopo l’assemblaggio delle due metà del primo prototipo di Starship: MK1 costruito a Boca Chica, in South Texas.
Osserviamo subito dei cambiamenti sostanziali con il progetto presentato lo scorso Settembre.

1) Le pinne dal numero di 5, (3 inferiori e 2 superiori), sono diventate 4 (2 inferiori e 2 superiori), tutte montate su attuatori. Ciò ha comportato che…
2) … si è scelto di tornare ad un design con zampe e pinne separate. Ne sono presenti ben 6, disposte nella parte inferiore della fusoliera in corrispondenza dei motori Raptor. Disposte sui vertici di un esagono regolare, di cui due allineate con il piano dove giacciono le pinne.
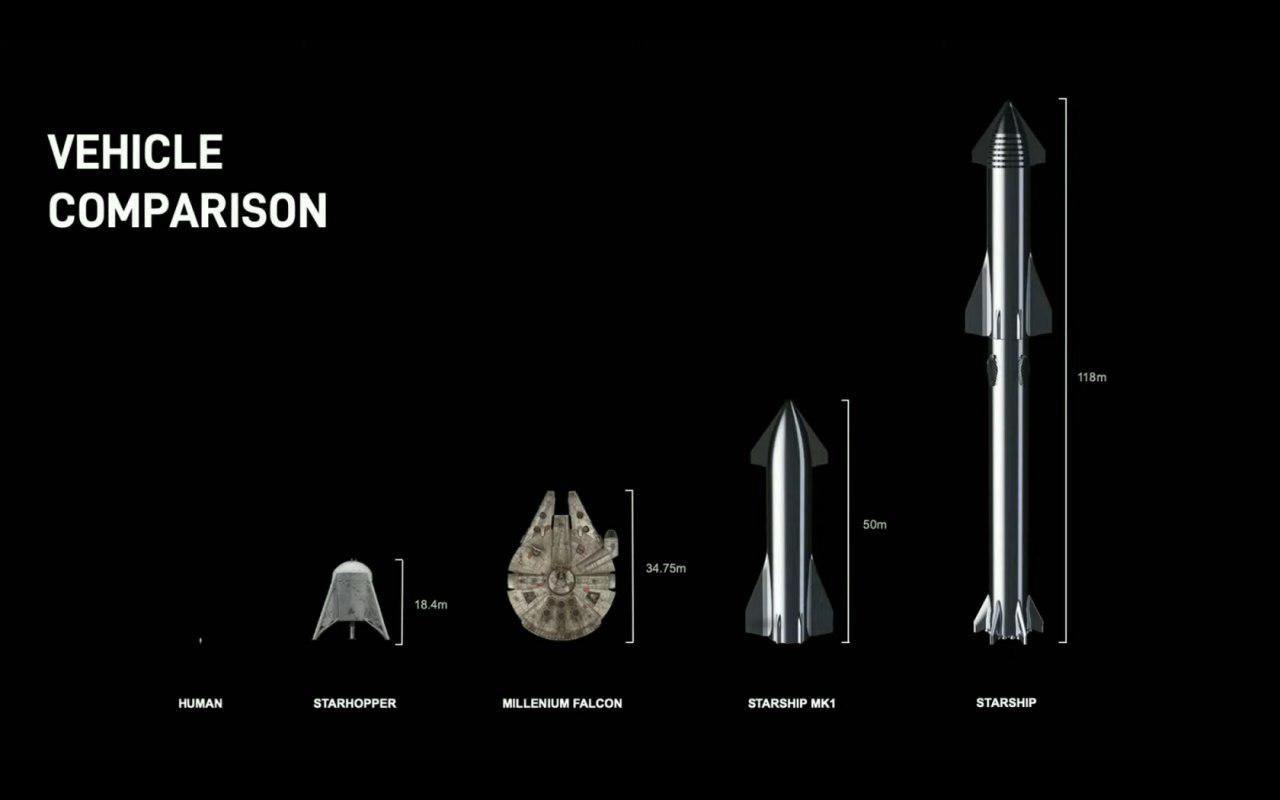
3) La lunghezza è stata accorciata di 5 metri, da 55 a 50 metri.
4) La massa a vuoto sarà di circa 120 tonnellate, una capacità di 1200 tonnellate di propellente, e sarà in grado di trasportare in orbita bassa terrestre (LEO) 150 tonnellate di carico utile, e trasportarne 50 nel rientro. Questi ultimi due numeri sono stimati nell’uso della Starship in piena riusabilità.
Se tale numero non sarà diminuito con le successive versioni, avrà una capacità di carico superiore alla versione più capiente del nuovo Sistema di Lanciatori Spaziali (SLS) della NASA (130 tons in LEO per l’SLS Block 2).
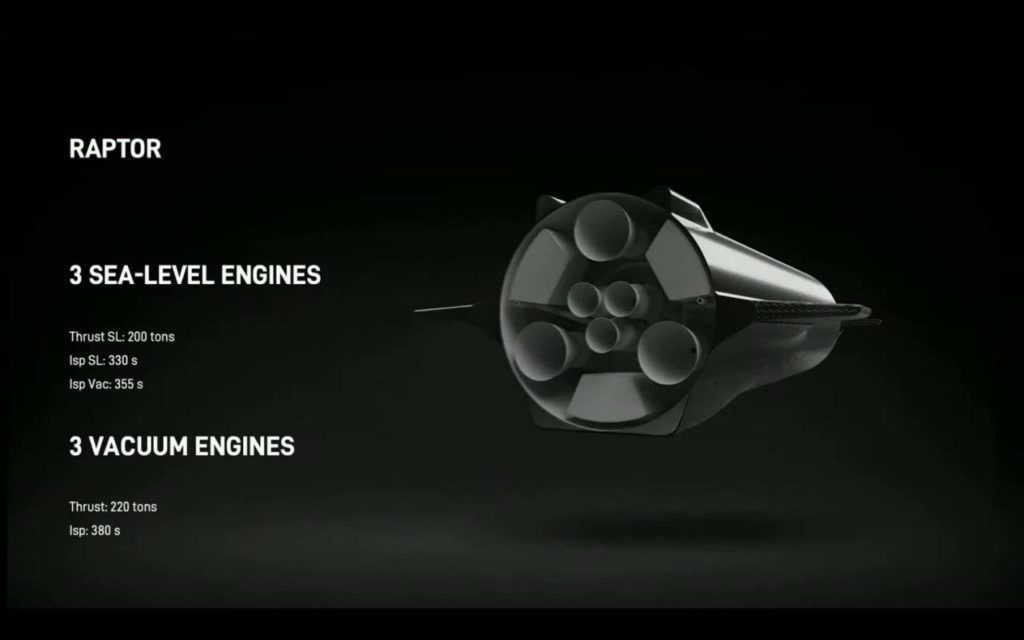
5) Starship monterà 3 propulsori Raptor con ugello adattato ad operare in bassa atmosfera, con un Isp di 350 s, con un diametro della sezione di uscita di circa 1,3m, in grado di direzionare l’ugello per direzionare la spinta (metodologia di controllo chiamata Thrust Vectoring) e 3 propulsori Raptor adattati per operare nel vuoto, con un Isp di 380 s, con un ugello con un diametro della sezione di uscita di 2,4 m, con ugello fisso (non direzionabile). Avevamo visto l’Isp in questo precedente articolo.
6) Fusoliera in Acciaio Inossidabile 301. Questa scelta è dovuta al fatto che a condizioni di temperature estreme, come temperature criogeniche o temperature elevate (da rientro atmosferico), presenta una resistenza maggiore dei materiali compositi e delle leghe di alluminio e litio (oltre ad avere una temperatura di fusione molto più alta). Ciò permette di ridurre le dimensioni dello scudo termico, rendendolo più leggero.
Oltre a ciò è più economico, facile da lavorare, rendendolo più leggero a struttura finita.

7) Lo scudo termico sarà composto da piastrelle esagonali in ceramica robusta (rubbed ceramic) e coprirà le zone della fusoliera sottoposte alle temperature più elevate.
Anche in questa presentazione Musk ribadisce l’importanza del rifornimento orbitale attraverso la Starship in versione “tank”.
Infatti ciò permette di acquisire circa 200 tonnellate di propellente. Quindi il rifornimento permetterà di sviluppare abbastanza deltaV per trasportare 150 tonnellate di carica utile più 200 tonnellate di propellente verso la Luna o Marte (350 tons in totale). Il volume pressurizzato dovrebbe mantenersi sui 1000 m3
Super Heavy
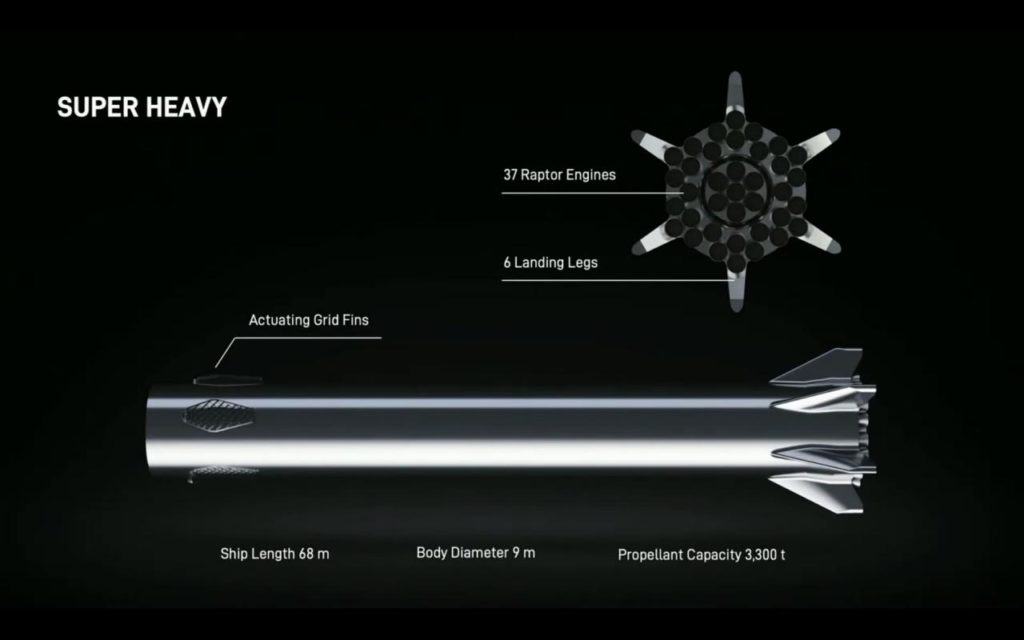
Super Heavy, il lanciatore, realizzato anch’esso in acciaio301, verrà dotato di 37 propulsori Raptor adattati per il volo atmosferico, di cui i 7 centrali direzionabili, in grado di sviluppare circa 2 volte la spinta del SaturnV (72000 kN di spinta massima). Sarà dotato di 6 pinne-zampe d’atterraggio rigide. Stiperà una massa di propellente di 3300 tonnellate, con ed avrà una massa di oltre 5500 tonnellate a pieno carico, compresa la Starship. Il lanciatore avrà un’altezza di 68 metri (per un altezza totale di 118 metri).
Fonte: SpaceX
Avere un rapporto spinta/peso così elevato permette di avere minori perdite gravitazionali (gravitational losses), ovvero le perdite dovute al fatto che parte della spinta che serve per portare il razzo alla velocità orbitale viene impiegata per muoversi all’interno del campo gravitazionale. Più velocemente ci si allontana dal centro del campo gravitazionale per raggiungere l’orbita e minori saranno queste perdite. Questo è essenziale, ribadisce Musk, per i razzi riutilizzabili.
MK1

Fonte: SpaceX
MK1 servirà per testare l’aerodinamica di questo nuovo design, effettuando voli fino a 20 km di altitudine. E’ equipaggiato con 3 Raptor Engine adattati al volo atmosferico, ed ha una massa a vuoto di circa 200 tonnellate.
Tale massa verrà progressivamente diminuita, raggiungendo le 120 previste con la produzione in serie, affinando le metodologie e tecnologie produttive. Durante questo iter sarà prevista la costruzione di altri prototipi da realizzare nei prossimi mesi ad un ritmo sostenuto. Già abbiamo visto che oltre al prototipo MK1 già è in costruzione il prototipo MK2. Musk prevede che mantenendo il ritmo, alla sesta iterazione, il prototipo MK6 dovrebbe essere in grado di raggiungere la LEO e dovrebbe essere realizzato entro 6 mesi, (ciò fa presupporre che anche il primo Super Heavy dovrà essere pronto fra 6 mesi).
Perché questo cambio di design, da 5 a 4 pinne, rispetto al precedente?
Possiamo provare a cercare una risposta prendendo in considerazione le due versioni della Starship + Super Heavy: e ciò riguarda la stabilità del razzo.
Generalmente, quando si progetta un razzo, si fa sì che il “Centro di Pressione“(Cp), definito come il punto su cui si sommano tutte le forze aerodinamiche, sia posto ad una certa distanza (r) dietro al Centro di Massa (Cm) del velivolo, (dove davanti corrisponde alla direzione del moto). Questo fa sì che se dovessero aver luogo eventuali forze aerodinamiche (F) atte a squilibrare il moto del razzo (ad esempio in un cambio di traiettoria, dove la velocità relativa del flusso d’aria che impatta il razzo non è parallela al vettore della velocità del moto del razzo), il momento torcente (M)
M = F ^ r
che ne scaturirebbe e che rischierebbe di ribaltare il razzo verrebbe gradualmente smorzato a causa della simmetria del flusso d’aria intorno al velivolo.
E’ uno strumento di controllo passivo, e che l’essere umano conosce da quando ha inventato l’arco e le frecce.
Nella versione precedente di Starship il centro di pressione è effettivamente molto basso, perché le pinne inferiori stanno in fondo alla fusoliera e sporgono oltre la fusoliera, in quanto svolgono anche la funzione di zampe di atterraggio.
Considerando però la configurazione (sempre precedente), di Super Heavy + Starship, avviene esattamente l’opposto: il lanciatore ha una massa enorme e sposta il centro di massa molto più vicino ai 31 raptor, mantenendo il centro di pressione invece più alto, poco sotto le pinne inferiori della Starship.
Questa è una configurazione di per se molto instabile, che se non fosse per i sistemi di controllo attivo, (ad esempio il Thrust Vectoring dei propulsori), tenderebbe naturalmente a squilibrare il volo di un razzo. Nonostante ciò comunque tali sistemi sarebbero soggetti ad un grande sforzo per mantenerlo stabile, e se non dovessero funzionare a tali velocità (come nei pressi del MaxQ, il momento in cui un razzo è sottoposto al massimo stress aerodinamico), significherebbe la distruzione dello stesso. Quindi è un design che presenta varie criticità.

Una soluzione si può trovare ad esempio riducendo il numero delle pinne alla base della Starship da 3 a 2 perché ciò diminuisce effettivamente la superficie totale d’azione della pressione e di conseguenza la forza aerodinamica agente, permettendo di abbassare il centro di pressione. Aggiungendo le pinne alla base del lanciatore Super Heavy, l’altezza di questo punto viene spostata ancora più in basso, offrendo così una maggiore stabilità insieme all’uso dei controlli attivi. Ovviamente ciò andrebbe verificato con dei calcoli alla mano, ma in prima analisi è proprio ciò che è stato fatto passando dal precedente all’attuale design.
Le pinne hanno la funzione di mantenere l’orientamento della navicella durante il suo volo atmosferico. Ruotate dagli attuatori, spostano la posizione del Centro di Pressione sia lungo la sezione della fusoliera e sia lungo l’asse di simmetria della navicella, variando quindi anche la distanza con il Centro di Massa. Lo scopo di ciò è sviluppare un Momento Torcente (M) che permette di ruotare Starship lungo i suoi 3 assi corpo, compiendo le rotazioni di Beccheggio, Imbardata, Rollio. Ciò si ottiene proprio non rendendo più parallelo il vettore distanza fra Cp e Cm all’asse di simmetria della navicella.
Riducendo il numero di pinne da 5 a 4, si sono poste tutte sullo stesso piano. Questo permette di avere controllo nel mantenimento della stabilità del volo.
La terza pinna inferiore che era presente nella versione precedente di Starship era fissa, e disposta su una collocazione triangolare insieme alle altre due pinne inferiori, vincolate agli attuatori, ponendole su un piano diverso rispetto alle due pinne superiori.

Fonte: SpaceX
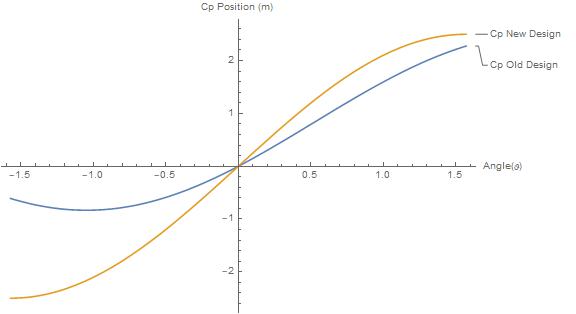
In una configurazione del moto con la prua rivolta verso la direzione del moto, ruotando le due pinne inferiori verso la pinna dorsale il centro di pressione si sposterà di molto in quella direzione, mentre ruotando nella direzione opposta si sposterà di meno. Ciò indica che una direzione è privilegiata nello spostamento rispetto all’altra che ne verrebbe penalizzata. Il che comporta che è più difficile effettuare una manovra che richiede di spostare il Centro di Pressione nella direzione penalizzata, oltre che ad avere una modalità di controllo più complessa, poiché rotazioni in versi opposti dello stesso angolo delle pinne non equivalgono a spostamenti della stessa distanza del Centro di Pressione nei versi opposti.
Invece, nella nuova versione, avendo 4 pinne vincolate ad attuatori sullo stesso piano, a rotazioni dello stesso angolo in entrambi i versi equivalgono spostamenti della stessa distanza del Centro di Pressione.
Vediamo quanto visto a cosa può portare considerando le due “situazioni limite” che può trovarsi a sperimentare Starship, in cui la prima presenta due varanti:
1a) Velocità relativa parallela all’asse di simmetria della navicella e prua rivolta verso la direzione del moto (ad esempio in una situazione di ascesa)
1b) Velocità relativa parallela all’asse di simmetria della navicella e poppa rivolta verso la direzione del moto (ad esempio in una situazione pre atterraggio)
2) Velocità relativa perpendicolare all’asse di simmetria della navicella e di conseguenza alle superfici di controllo (le pinne), che è la vera innovazione di questo genere di design.
Nel primo caso, 1a) si ha che il Cp è dietro al Cm e la navicella si trova in configurazione di volo stabile. Ad esempio può trovarsi a sperimentare questa situazione nel caso di ascesa dalla superficie di Marte.

Nel caso 2) le pinne si trovano perpendicolari al moto ed alla direzione dell’aria, come tutta la fusoliera (si troverebbe orientata in orizzontale) sviluppando quasi totalmente resistenza aerodinamica, con la conseguenza di frenare il moto. Un esempio è quando la navicella, una volta finita la manovra di rientro atmosferico si ritrova in caduta libera dagli strati più alti della troposfera.
Il caso 1b) è quello che si troverebbe a sperimentare una volta postasi in verticale per accendere i propulsori e frenare poco prima di atterrare. In questa modalità di volo si troverebbe in una situazione instabile, poiché il Cp sarebbe davanti al Cm.
In questo caso la scelta migliore è ruotare le pinne inferiori per da portarle il più vicino possibile alla fusoliera, minimizzando il loro effetto sul fluido e quindi sulle forze di pressione. In tal modo l’azione delle superfici di controllo è dovuta interamente dalle pinne superiori, spostando così il Centro di Pressione sopra il Centro di Massa ovvero dietro (rispetto al moto), quindi in una configurazione stabile. Come è possibile vedere in questi fotogrammi di una simulazione di atterraggio
Durante il rientro atmosferico (airbraking) Starship si troverà a sperimentare una combinazione fra i casi 1a) e 2). Inoltre, i profili delle pinne, trovandosi orientati di circa 60 gradi rispetto il flusso dell’atmosfera incidente, sviluppano portanza a regime ipersonico. Ciò permette a Starship di non cadere molto velocemente e quindi essere soggetta ad un surriscaldamento sostenibile dalla struttura, scendendo gradualmente nei livelli più densi dell’atmosfera. A differenza di un profilo inarcato, un profilo simmetrico non genera portanza senza che ci sia un’angolo fra la corrente di fluido e la corda dell’aletta.

Link alla Conferenza:
Fonte: SpaceX, Elon Musk.