

Ci vuole Ingegnosità per volare su Marte
Ingenuity sarà il primo elicottero marziano, e in inglese il suo nome significa proprio ingegnosità. Come tutti i robot inviati verso Marte, dopo aver ricevuto le istruzioni per le operazioni di decollo, volo ed atterraggio, sarà lasciato a se stesso mentre le eseguirà. Dovrà essere in grado di gestirle in piena autonomia ed essere in grado di affrontare degli imprevisti prendendo delle decisioni. Ciò rappresenta una nuova sfida, perché se consideriamo quanto già fosse complesso per le operazioni dei rover che si muovono al suolo, figuriamoci per un robot che dovrà volare.
Ma, prima di questo, c’è un problema a monte: come si può far volare un elicottero in un’atmosfera che ha una pressione al suolo di un centesimo di quella terrestre?
In effetti, Marte non è dotato di un’atmosfera spessa e densa, e presenta una pressione al suolo di 1 kPa (sulla Terra sono circa 100 kPa), e una densità atmosferica pari a quella che si avrebbe sulla Terra a 35 km di altitudine. E sta proprio qui l’ingegnosità: cercare in primis di farlo volare!
Un elicottero è un aereomobile ad ala rotante, il che significa che i rotori non sono delle eliche ma delle ali rotanti. Quindi un elicottero genera una spinta per librarsi grazie alla portanza. Il problema di fondo nel generarla è vincere l’omogeneità della pressione idrostatica, che viene esercitata da un fluido che circonda un corpo con la stessa intensità da tutte le direzioni, qualsiasi sia la sua forma. Ponendo in moto il fluido rispetto al corpo (o viceversa), si può sfruttare la pressione derivante dalle velocità per esercitare portanza.
Si può ottenere modellando un profilo aerodinamico asimmetrico tale che l’aria si muova a velocità diverse fra i suoi contorni superiore e inferiore, di lunghezze diverse. Ciò fa sì che alle differenti velocità corrispondano diverse pressioni fra i due contorni (ed estrudendo il profilo nella terza dimensione, sulle due superfici). La differenza fra queste due pressioni è proprio la portanza alare che permette agli aeromobili di controbilanciare la propria forza peso e alzarsi in aria, ed è indipendente dalla natura di questa velocità. Quindi sia che l’ala trasli linearmente nel fluido e sia che ruoti in esso, si sviluppa comunque una portanza, perché l’unica cosa che conta è che esista una velocità relativa fra l’ala e il fluido. Qui c’è la differenza fra gli aerei ad ala fissa e gli aerei ad ala rotante, gli elicotteri!
Il fatto che nonostante il corpo si muova ad un’unica velocità in un fluido e che l’aria possa percorrerlo a velocità differenti lungo il suo profilo ci è garantito dalla conservazione della quantità di moto e della massa. Infatti, in condizioni di flusso stazionario, laminare ed incomprimibile, due cubetti infinitesimi di fluido che incontrano insieme il bordo d’attacco del profilo, nonostante percorreranno cammini differenti, si dovranno ricongiungere contemporaneamente all’uscita del bordo d’attacco per abbandonarlo insieme. Ciò implica che dovranno percorrerli a velocità differenti. Questa condizione prende il nome di Condizione di Kutta.
Un altro modo per ottenere una forza di pressione è quello che vede un profilo aerodinamico simmetrico che, inclinato con un angolo di incidenza positivo rispetto alla direzione del flusso, lo devia così da essere spinto nel verso opposto. Similmente avviene per gli alettoni, che rendono asimmetriche ali con profilo simmetrico. È essenzialmente ciò che abbiamo fatto tutti quando in automobile a velocità sostenute, surfiamo con la mano l’aria fuori dal finestrino. Anche in questo caso vale quanto abbiamo visto prima per la Condizione di Kutta.
Le eliche, grazie alla loro forma, spingono il fluido a muoversi in una direzione perpendicolare rispetto al piano descritto dall’elica. Questo è il modo usato generalmente dai comuni droni commerciali per librarsi in aria.
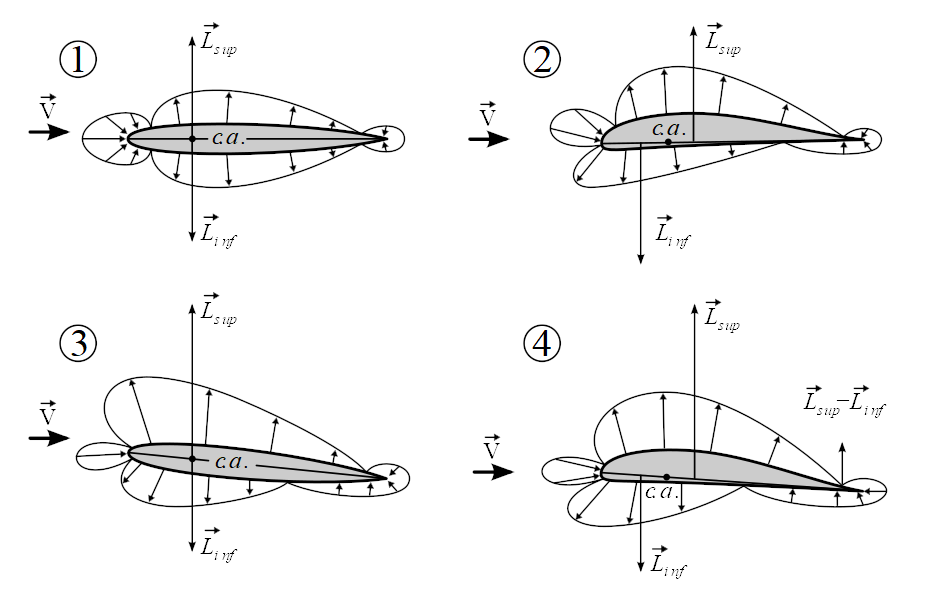
1) Profilo Simmetrico con Angolo di Incidenza Nullo.
2) Profilo Asimmetrico con Angolo di Incidenza Nullo.
3) Profilo Simmetrico con Angolo di Incidenza Positivo.
4) Profilo Asimmetrico con Angolo di Incidenza Positivo.
Fonte: Wikipedia
In un elicottero, i rotori sono imperniati per poter ruotare lungo il proprio asse e cambiare l’angolo d’incidenza della pala, così che questa eserciti più portanza quando si trova in una metà del giro e di meno quando si trova nell’altra metà, generando una coppia che permette di ruotare l’elicottero nei tre diversi angoli di controllo. Ciò viene gestito inclinando nella direzione opportuna un piatto basculante a cui le pale sono vincolate tramite delle aste. Quindi un elicottero è dotato di una meccanica complessa per gestire il suo moto nello spazio, che in un drone quadricottero viene rimpiazzata da un’elettronica sofisticata che gestisce più rotori controrotanti mossi da motori indipendenti fra loro.

Fonte: MechStuff
Ingenuity è dotato di due rotori coassiali controrotanti più simili alle eliche dei droni per aumentare la spinta forzando il fluido a muoversi in basso. I rotori di Ingenuity ruotano ad una velocità di circa 2400 rpm, ben 8 volte più velocemente di un elicottero terrestre per produrre la stessa spinta. Se siete curiosi di scoprire come mai proprio 8 volte, vi invito a seguire il ragionamento/calcolo proposto nei dettagli:
In Copertina: Rendering Artistico di Ingenuity lasciato sul suolo marziano dal rover Perseverance che lo trasporterà sul Pianeta Rosso.
Fonte: JPL/NASA